1.8. Actuators#
An actuator converts electrical energy into some useful physical action such as rotation, linear motion, heat, sound, light or fluid flow.
1.8.1. Types of Actuators#
While actuators can perform many kinds of actions, most can be categorised as performing either:
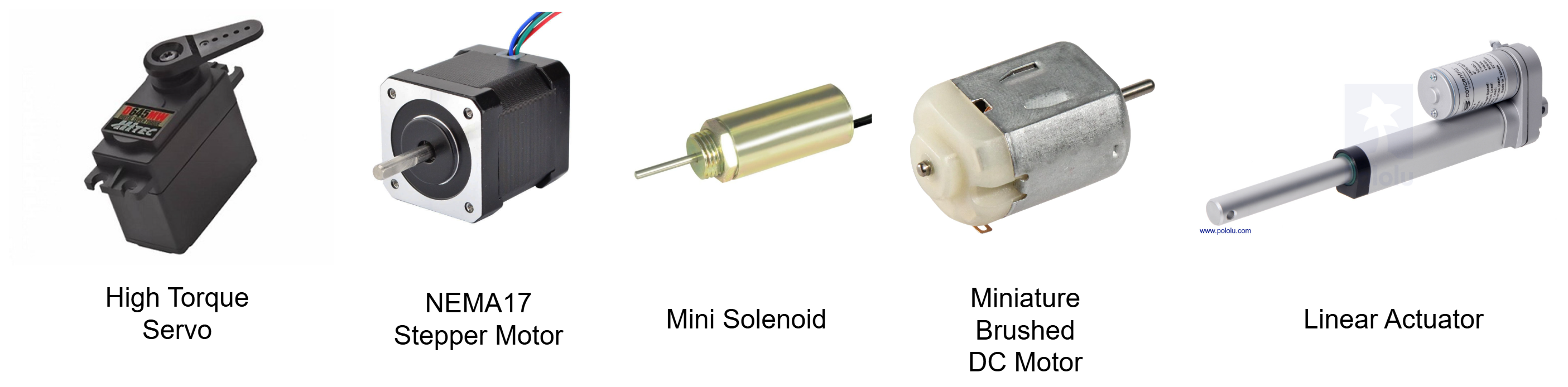
Rotary motion - such as a motor
Linear motion - such as a solenoid
Different kinds of actions can be created by transforming either rotary or linear motion. For example
linear actuators use a motor to spin a leadscrew which moves in a straight line
the flow of fluid through a pipe can be controlled by a solenoid plunging or retracting a valve
1.8.2. Controlling Actuators#
Actuators can be controlled in a variety of ways. However they must all start as electrical signals from the microcontroller. These signals overlap with sensors, except now the microcontroller creates the signals rather than listening to them:
Voltages - converted by Digital-to-Analogue converters on the microcontroller
PWM - digital pulses of varying widths
Digital buses - protocols that support multiple devices over a shared wire and complex data transfer
Actuators often require more power than the pins of a microcontroller can safely provide. Therefore it is common to use dedicated controllers for actuators that are can handle the power needs. The microcontroller sends a signal to these dedicated controllers, which then use high power relays or transistors to control the actuator.