5.5. Touch and Proximity#
Touch and proximity sensors allow systems to detect the presence, approach, or contact of objects without requiring mechanical switches.
5.5.1. Capacitive Sensors#
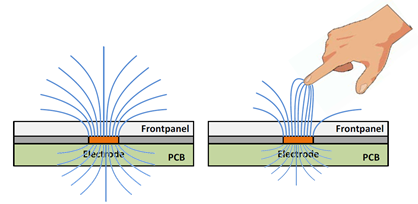
Capacitive sensors work by detecting changes in capacitance between conductive surfaces. A basic capacitive touch sensor uses a conductive pad that forms one plate of a capacitor, with the surrounding environment acting as the other plate. When a finger or hand approaches, the body’s natural capacitance alters the electric field, and the change is detected by the circuit.
The capacitance is not measured directly, but rather its value is used as input to another circuit that depends on the capacitance such as an oscillator. The frequency of the oscillator is controlled by the capacitance and then the timing between peaks can be measured to determine capacitance.
Capacitive sensors are widely used in touchscreens, control panels, and proximity switches because they can sense through thin insulating layers like glass or plastic. They are highly reliable, support multi-touch designs, and are resistant to wear since there are no moving parts.
5.5.2. Hall Effect Distance/Proximity Sensors#
Hall effect sensors measure the strength of a magnetic field to detect the presence or movement of a magnetic object. For proximity or distance sensing, a magnet is placed on the moving object, and the sensor measures how the field changes as the object approaches or recedes. The relationship between magnetic field strength and distance is predictable, allowing the sensor to infer position.
5.5.3. Ultrasonic Sensors#
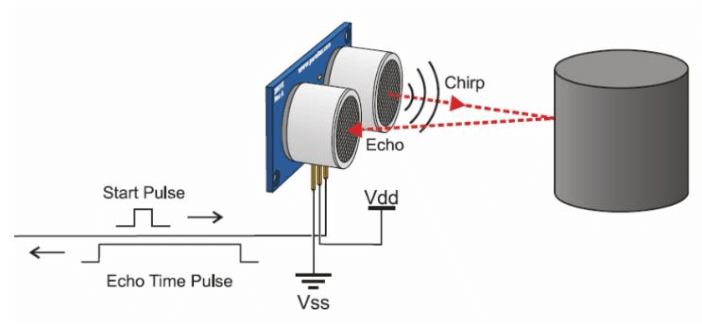
Ultrasonic sensors use high-frequency sound waves (typically 40 kHz) to measure distance. The sensor emits a sound pulse and then measures the time taken for the echo to return after bouncing off an object. Since the speed of sound in air is known, the distance can be calculated from the travel time.
These sensors are widely used for robot obstacle detection, parking assist systems, liquid-level measurement, and automation safety. They work well with a variety of surfaces and can detect transparent or dark objects that might confuse optical sensors.
5.5.4. Infrared Time-of-Flight Sensors#
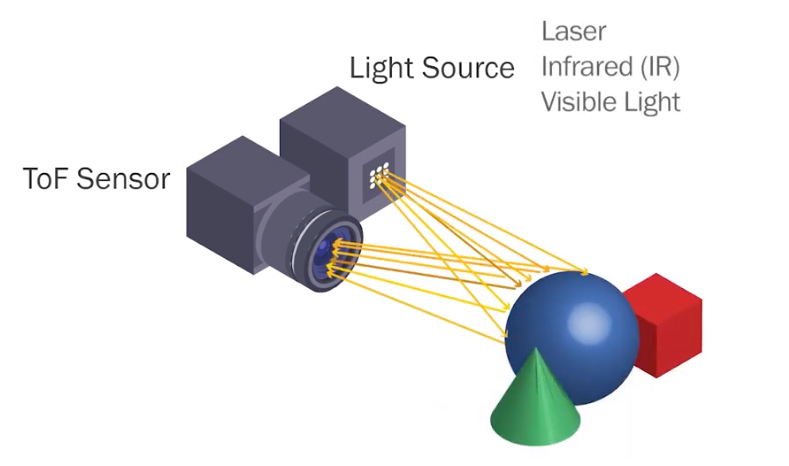
Infrared (IR) time-of-flight (ToF) sensors measure distance by emitting a modulated or pulsed beam of infrared light and calculating how long it takes to reflect back from a surface. Unlike simple IR reflectance sensors, ToF devices provide absolute distance measurements.
ToF sensors are compact and capable of high-resolution measurements, even in small packages. They are commonly used in gesture recognition, smartphones (for face detection and proximity sensing), drones, and robotics navigation. Compared to ultrasonic sensors, they offer faster response times and better accuracy at short range. However, they can be affected by bright sunlight or highly reflective/absorptive surfaces.
5.5.5. LiDAR Sensors#
LiDAR (Light Detection and Ranging) systems extend the time-of-flight principle to create detailed 3D maps of the environment. A LiDAR sensor emits laser pulses (typically in the near-infrared range) and measures the time it takes for each pulse to reflect back from surrounding objects. By rapidly scanning in multiple directions, LiDAR builds a point cloud — a dense 3D representation of the environment.
LiDAR provides long-range, high-resolution distance and shape information, making it essential in autonomous vehicles, robotics navigation, surveying, and environmental mapping. Unlike single-point ToF sensors, LiDAR captures an entire scene with depth information.
However, LiDAR systems are more complex and costly, requiring precise optics, scanning mechanisms (mechanical or solid-state), and significant processing power. They can also be affected by weather conditions such as fog, rain, or snow, which scatter or absorb laser light.